松下伺服回原点Z相(松下机械手原点调整方法)
Posted
篇首语:进学致和,行方思远。本文由小常识网(cha138.com)小编为大家整理,主要介绍了松下伺服回原点Z相(松下机械手原点调整方法)相关的知识,希望对你有一定的参考价值。
松下伺服回原点Z相(松下机械手原点调整方法)
大家好,我是头条@电气电子技术,欢迎大家的关注和浏览!
松下焊接机械手是工业生产常见的机械设备。很多维修人员只懂得修正位置或者做个简单的编程,而不会复位机械原点。
复位机械原点,即TCP调整方法,很重要,在面对复杂的焊接轨迹时,原点位置准确,机械人姿态就会顺畅和灵活,而且焊接的效果也比没有原整原点之前好得多。
所以,维修人员或者机械手使用者,要懂得调整!

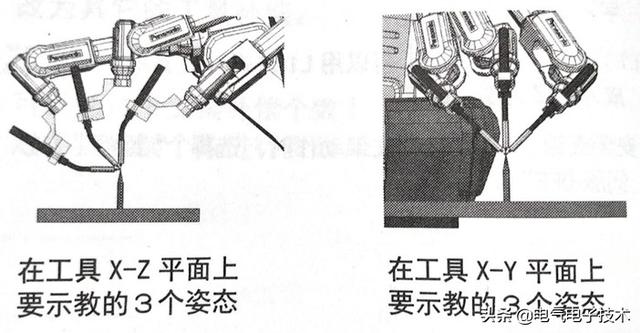
将TCP(Tool Center Point:工具控制点),通过输入特定的示教姿态,计算出工具补偿值,来进行设定的工作。叫做TCP调整。必须在同一个点上示教保存6个工具姿态(工具X-Z平面上3个,工具X-Y平面上3个)。进行TCP调整时,不计算工具安装角度 “TW”的值。因此,应事先正确设定要调整的工具补偿TW的值。
第2点的示教位置应和示教第1点时的基准点(销2针)对准,且TW轴不得发生转动。
如图所示,请准备好一个调整用销针(基准点),使得点的位置固定
具体调整方法:
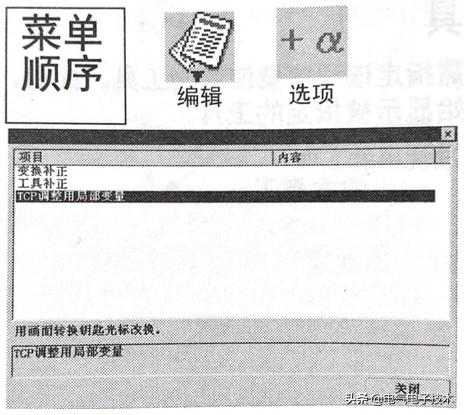
1、登录TCP数据。
【编辑】—>【选项】
(1)选择“登录TCP调整用全局变量”。
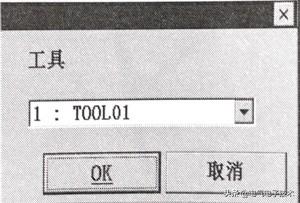
2、选择调整TCP使用的工具。
3、当出现机器人变量浏览窗口后,登录第一点。
<登录第一个点>
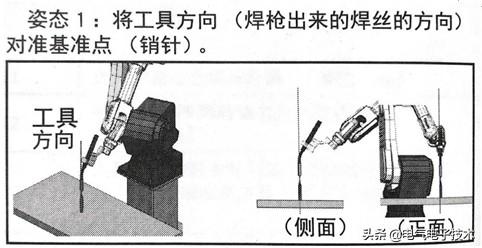
在工具点(焊枪岀来的焊丝尖端)与基准点相重合的位置的附近登录第一个点。
(工具Xz平面内的第一个点。参考“姿态1”)
将光标移到变成“无效”的机器人型变量上,按下“登录”按钮。
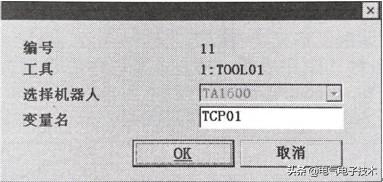
4、要将登录数据作为变量名识别时,输入“变量名”后点击OK。
5、登录第二个点
<登录第二个点>
在工具坐标系下,移动Y轴,使调整销针的方向和T w轴回转中心轴相平行的位置附近,登录第二点。(X-Z平面姿态中的第二个点)
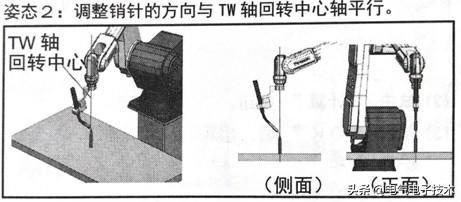
备注:回转动作只能使用工具坐标系的Y轴以外不能使用。 将光标移到登录第二点的变量上,单击 “登录”
6、(再继续转动Y轴,示教第三个点。
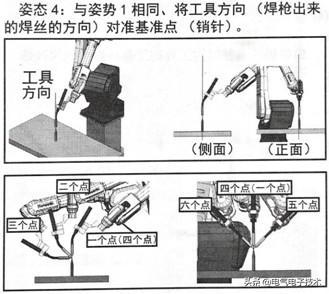
7、第4点登录与第1点相同的姿势。
8、第5点、6点、通过工具XY平面姿势的点进行示教。
备注1:示教第5, 6两个点时, 只能转动工具坐标系下的Z軸。
备注2:第1点到第6点的姿势如图所示。
9、完成6点的调整后,依次单击【文件】->【关闭】菜单,关闭机器人型变量的浏览窗口。
出现“是否保存?”确认对话框后,必须单击“是”进行保存。
这样,TCP调整也就完成了,原点位置理论上也足够的精准了。我们在完成后,可以通过转动机械臂,转动姿态,检验其是否有足够的精准度。如果还是差一些,就再做一次原点调整。
做这项工作时,应尽可能的细心和留心,步骤不能出错,一步一步的做!
我是头条@电气电子技术,这期机械手原点位置讲解就讲到这里,欢迎大的的关注和浏览!
相关参考
松下伺服回原点(松下高速度、高性能、高层级FP-XH系列来袭)
高速度、高性能、高层级FP-XH系列下文将详细介绍FP-XH系列的各个产品,总有一款适合您!01FP-XH通用型基本性能高,功能丰富,阵容强大,用途广泛。产品特点高速·高性能基本命令:5k步内0.04μs/步,扫描周期:5K步内0.5ms默认32k...
松下伺服电机回原点不准(“新奇特”里的“美美与共”,进博会上将怎样演绎“消费升级”)
新华社上海11月1日电题:“新奇特”里的“美美与共”,进博会上将怎样演绎“消费升级”新华社记者周蕊、王默玲这里有全球最新最潮的首发,也是透视消费升级大机遇的窗口,以这里为原点,展品变身为商品,新品走进首店...
摘要本文介绍一种简单桁架机器人的应用。汽车总装生产线使用机器人来搬运沉重座椅,不仅减少了劳动力,而且操作方便,定位精度高。座椅机器人可以根据座椅的大小、传输的远近、摆放的角度来进行调整。柔性化生产在现...
松下伺服驱动器原点设置(云工控资讯:如何实现松下伺服电机的上位控制?)
...当了放大器的角色,这是绝大部分伺服的工作模式,比如松下、安川,富士,三菱,台达等等。还有部分伺服驱动器内置控制器功能,可以在驱动器内部进行编程,实现运动控制,能实现电子凸轮,相位同步等等高级运动控制功...
伺服压机为什么要回经常性复位文章来源:404一、初次运行程序。第一次运行程序,虽然当前位置可能是0,也有原点信号输入,但系统并不知道原点信号在什么位置,要执行绝对定位,必须要利用回复位指令通过特定的方式搜...
...失掉原点数据,需要重新进行零点复归。机器人通过闭环伺服系统来控制机器人各运动轴。控制器输出控制命令来驱动每一个马达。而马达上装配的称为串行脉冲编码器的反馈装置将把信号反馈给控制器。在机器人操作过
数控机床机械原点的概念(数控初学者必须要知晓的几个重要概念)
编程时,无论是机床的工作台运动还是主轴提供的x、y向运动,初学者一定要记住:数控编程时所用的坐标系是以刀具相对静止的工件运动为原则。即永远假设工件不动,刀具相对于工件运动。数控机床坐标系采用的是右手笛卡...
三菱M70系统数控加工中心当电池报警Z轴原点丢失时会出现换刀高度不对的情况,在设定好“Z轴”原点后要设定机床换刀的高度,打开(参数显示页面)输入“2038”出现高度数值(如-60)记下此数值。将机械原点回零并将"Z值“归...
...位置测量、控制、显示的统一基准,也就是刀具回到机床原点,机床原点通常在刀具的最大正行程处,它的位置由机床位置传感器决定。机床回零后,刀具(刀尖)的位置与机床原点的距离是固定不变的,因此,为便于对刀和加...
松下伺服电机代理—日弘忠信今天给大家讲讲松下伺服电机调整电机负载如何设置?a5伺服电机报警处理方法。a5伺服报警处理方法 原因:参数设置不太合理,负载系数小;运行时,无法克服平衡板的弹力,至使下压不到位...