机器人内部传感器包括(用细胞制造的生物混合机器人——机器人领域的下一个前沿)
Posted
篇首语:读书贵神解,无事守章句。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人内部传感器包括(用细胞制造的生物混合机器人——机器人领域的下一个前沿)相关的知识,希望对你有一定的参考价值。
机器人内部传感器包括(用细胞制造的生物混合机器人——机器人领域的下一个前沿)

导语
说到机器人,我们头脑中的画面大概是以金属塑料为材料,模仿人类或其他生物的行为。随着生物科学的进步,生物的细胞和组织也被用来当作机器人设计材料,将生物材料融合进机器人,也就是生物混合机器人(biohybrid robots)。生物混合机器人可以在多尺度下作为可控的机器进行工作,小到亚细胞级,大到生物体级别。可是这种混合机器人面临一个严重的考验:如何让融合的生物材料稳定生长、持久耐受?这要求对于生物材料的供能必不可少,其中微流控技术就可以在未来改善组织灌注,组织生长,实现传感、处理的精确控制模式。这篇今年8月发表于 PNAS 的文章为我们详细解读了微流控技术为生物混合机器人领域带来的各种可能突破
研究领域:生物混合机器人,微流控技术
论文题目:
Will microfluidics enable functionally integrated biohybrid robots?
论文来源:
https://www.pnas.org/doi/10.1073/pnas.2200741119
1. 生物混合机器人和微流控技术
曾几何时,机器和人的结合只出现在科幻小说和电影中,而如今,从心脏起搏器到机器义肢再到脑机接口,人机交互早已不是新鲜事。可是反过来呢?在机器人身上配备人体组织或细胞,让机器人更加接近人类,那会是怎样的场景?
一般意义上的机器人我们称之为 Cyborg,也就是《异形》系列中的生化人,它们是完全冰冷的机械个体;而与生物结构相结合,则称之为 Biohybrid,也就是这里所提到的生物混合机器人(biohybrid robots),它们具有更多的生命性。现如今,科学家们通过不懈努力,在微观到宏观层面上,将机器人与细胞结合,创造出能够进行各种工作的生物混合机器人。
对于生物混合机器人来说,生物组织需要生存,组织液体的灌注是必须的,所以对于生物混合机器人领域,核心技术之一就是如何精细控制灌注生物组织的液体——即微流控技术(microfluidics)。
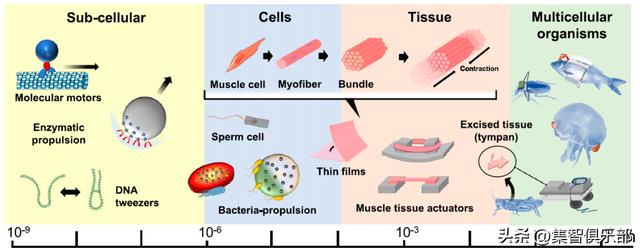
图1:各个尺度下的生物混合系统。
亚细胞生物混合系统是由动态分子的相互作用和酶的催化活性驱动的。微型机器人可以从单个活动细胞(例如,细菌,藻类,原生动物,精子细胞)中获得。可收缩细胞能在体外组装,形成由功能性肌肉组织组成的毫微米尺度下的驱动器。组织可以从动物身上移植,并集成到机器中,以实现各种功能(例如,驱动或听觉感知)。最后,多细胞生物既可以用来指挥机器,也可以被集成的人工装置控制。
微流控技术是流体力学和微机电系统技术的结合,对基础细胞生物学、生物分子分析等多个研究领域做出了巨大贡献。微流控技术可以通过使用微气动系统(如液体泵、气体驱动阀)和微流体结构,分别引导(芯片)片外和片上流体(从纳米到毫米体积的流体)。通过理解和控制微观系统中的流体行为,我们可以在保留或改进某些原始特征的同时,减少复杂宏观系统的规模。这种微型化的潜力已经引起了其他研究领域(如机器人和组织工程)科学家的注意。所以微流控在帮助精细控制灌注生物混合机器人的生物组织的液体方面,有着令人十分憧憬的发展前景。
这篇文章则描述了如何将活组织与微流控装置结合,以及从这种结合中获得的好处,特别是在组织制造、发展和功能控制方面。文章同时强调微流控技术在支持大组织灌注和血管化方面的影响力,以及对生物混合机器人的功能集成组织的影响。
科学家们对生物混合机器人越来越好奇,努力解锁细胞的潜力,以实现更高性能的机器。活细胞在传感、控制和电源供应方面已经显示出实用价值,特别是机器人的驱动方面。在以下段落中,作者简要回顾了使用细胞驱动和其他功能的历史里程碑,同时描述了最有希望的改进方向。
2. 由细胞实现的生物混合机器人
2.1 细胞用作驱动力
2005年,研究者将单个心肌细胞发育成肌束后与硅制微机械结构进行集成,用作力传导和运动系统。从那时起,便有了各种基于收缩肌细胞的生物驱动器,来执行各种运动功能。采用功能性的3D构象技术,可以进行较为复杂的运动任务,例如抓、走、游泳,均具有较高的空间和时间控制能力[2,3]。
基于收缩肌细胞的生物驱动器具有很多独特的特性,比如,无声操作、柔软的手感、生物可降解、自愈能力,以及采用能量密集、廉价和环保的葡萄糖作为燃料[2,3]。单个骨骼肌管和心肌细胞产生的收缩力分别为约 1 μN 和 10 μN,同时它们可以在微米尺度下产生可检测的力,相对于现有最小的传统驱动器(压电驱动器)只能在 >1 mm 的尺度下有效缩放[2,3]。所以这种生物驱动器在两种尺度下都具有独特的潜力:一方面,基于收缩肌细胞的微观生物驱动器可以在小型生物医学机器人中应用;另一方面,宏观的生物驱动器将使机器人具有栩栩如生的动作、自我修复和柔软的手感,以便与人类和其他物种进行亲密接触和互动。
过去十年,体外制造生物驱动器方面取得了相当大的进展,但是目前基于工程肌肉组织的生物驱动器的性能还是远不如原生肌肉以及其它任何可用的驱动技术。合成驱动器的体积从 0.1cm3~0.1m3 不等,产生的力大约在 102 ~105 N 之间,这比目前的生物驱动器的力高出了多个数量级(大约在 10-6~10-3N 之间)。此外,长期保持较低的质量功率比有望提高生物驱动器的长期性能,但是工程肌肉组织仍然存在较差的中期和长期功能表现,这是由于细胞活力的衰减和结构体的体外稳定性变差。
针对上述存在的问题,作者认为可以考虑改进以下几个方面:一、肌肉组织的体外制造需要更加高效、仿生、可控。在这种情况下,肌肉细胞的基因工程可能可以通过调节细胞骨架和收缩相关蛋白的表达来增强其收缩力(如肌动蛋白、肌凝蛋白、肌钙蛋白),以及肌源性分化和肌肉组织发育的调节因子。二、最大限度地将力从收缩单元传递到骨架的界面来减少合成骨架结构和肌肉组织之间的有限相干性导致的力的分散。三、为了扩大其操作的多功能性,生物驱动器需要能够支持细胞在“实验室外”长期存活。四、基于多尺度和多物理模拟的先进建模可以帮助快速优化生物驱动器的性能。
2.2 细胞用作传感、控制和电池
细胞可以感知和处理外部刺激,也可以有效地从环境中的营养物质中提取化学能,并将其转化为机械能。细菌、多细胞生物的特化细胞可以用来实现机器人的传感、控制和供电功能[32-35]。
关于化学生物传感器,感知机械刺激的生物混合技术也已经成功制造出了专门用于触觉或者听觉感知的细胞 [16,36]。某些细胞或者有机体的光学反应则为生物视觉和机器人控制开辟了前景。在千禧年初,由活细胞和工程材料组成的视网膜假体开始了恢复视力的研究 [40-42]。光遗传基因组修饰使细胞具有光敏性,这种后天的、非自然的能力可被利用来控制细胞的固有功能(例如,神经元和肌肉细胞的电化学信号或物理收缩)[37,43]。十多年前,人类和其他物种的神经元已经被培养在人造芯片上,以驱动机器人运动或执行其他任务功能,而最近,关于机器人生物控制的研究集中在使用神经元调节肌肉驱动器的收缩 [47-49]。
细胞的另一个应用涉及生物电的产生。将自发跳动的心肌细胞与通过压电效应产生电压的材料连接,可以产生电能,并用于为微电子设备供电 [50,51]。另外,基于全细胞的光合生物混合系统可以调节可持续的太阳能到化学能的转化(例如,光促进二氧化碳减少和生物氢生产),可以用于能源生产和存储 [52,53]。
3. 微流控技术:机器人和组织工程之间的桥梁
3.1 用于机器人的微流体
微流体可以和机器人等动力系统进行有效的协同工作。在软体机器人中,驱动常常是由流体压力驱动的,同时由于软体机器人中的材料变形通常是由于流体压力引起,所以微流控技术有助于实现对主动驱动精细控制。关于机器人技术和微流控之间的界面的出版物很少。这种研究的稀缺是由于软机器人是大约10年前出现的一门年轻学科,而微流体学则在过去20年里不断发展[56-59]。
3.2 用于组织工程的微流体
在许多含有细胞的工程应用中都离不开微流体的应用。所以微流控技术在细胞过程(如生长、老化)以及微环境研究中非常有用。近年来,微流控技术和组织过程技术日益融合,这项技术能够让我们在微米到毫米大小的通道中进行微流体的灌注和流动。
微流体是许多含有细胞的应用的基础。特别是,微流控技术在细胞过程(如生长、老化)、特性(如粘附、束缚)和微环境的研究中非常有用[60-63]。近年来,微流体技术与组织工程技术日益融合。微流体允许我们在微米到毫米大小的通道中进行流体灌注和流动;在一个系统中培养多种细胞类型;优化生化梯度;并通过机械力刺激细胞[64,65]。未来,微流体将进一步促进组织工程,使科学家能够复制和控制细胞微环境中的条件,并利用于新兴的类器官领域。最后,微流控技术可以让我们培养大型组织结构,包括构建模仿自然组织血管化的可灌注通道系统。微流控技术可以通过在通道内精细施加流体流动来精确地分布流体压力。可以设想,在大体积组织中掌握流体微动力学将确保对细胞存活的精细控制,从而实现体外长期的生命活力[66-69]。
3.3 微流控技术应用在生物混合机器人中的潜力
图2中,作者向我们展示了微流控技术在生物混合机器人中的应用潜力——组织工程和机器人的结合。虽然目前大多数生物混合机器人的研究都集中在生物驱动方面,但对其它生物功能的兴趣在不断增加,最近关于环境感知和运动控制的文章 [16,18,19,47] 证明了这一点。
微流体平台在细胞培养方面的敏感性能够促进特定类型的细胞(如神经细胞)和肌肉组织进行融合,从而赋予生物驱动相关功能(如运动控制)。流控技术还能使我们安全地操作脆弱的组织单元,在大规模生产过程中从形态上控制它们的形成。
在微流控芯片中可以将细胞和其它控件连接起来。例如,通过芯片,细胞可以在机器人中实现例如水污染检测等实际应用。在这种配置中,细胞可以暴露在环境液体中,然后进行分析。细胞活力与已知或未知污染物的存在相关联,然后通过转导信号(通常是阻抗或基于色谱的响应),这样就允许研究人员评估水样的质量[72]。
在最近的研究中,蝗虫的鼓室器官被用作听觉传感器来控制机器人的运动,提取的组织包括完整的听神经,它能够记录由声音触发的神经活动[16]。这种声学生物传感器由机器人中的微流控芯片实现,该芯片配有电极,将听神经的电生理反应传递给机器人,微流控芯片提供了一个腔室来保持生物传感器的活性并执行电生理记录,证明了机器人内部复杂组织的可集成性。不久,基于细胞对机械波和负载的理解,微流控可能会解锁听觉和触觉感知的技术实现。重要的是,下一代微流体生物传感器可以不用再直接使用从动物身上提取的预制组织,而是使用细胞聚集体或是通过自下而上的组织工程构建的组织。通过这种方式,感觉细胞可以根据预先设计的图案,更好地与微芯片的组件相结合。因此,通过微流控芯片和生物制造技术,微流控技术将提高收缩组织的性能,并使生物混合机器人的新形式和应用成为可能。
生物混合机器人的一个未来期望是扩大生物组件,以实现具有高能量转换效率的大规模机器人。基于微流控的微生物生理学可能使大型、耐用和自主的生物机器成为可能。在这种情况下,微流控能提供足够的组织灌注,以有效地分配氧气和营养到大尺寸组织的细胞中。此外,也可以开发便携式微流控系统,它能够让细胞在移动机器人中生存。微流控技术将如何以及在多大程度上改进生物混合机器人还有待观察,它可能先从改进细胞组装开始,然后再涉及到更复杂的机器人生物模块的实现。
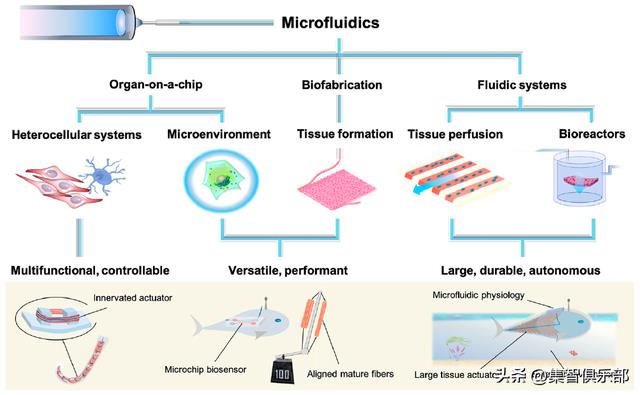
图2:微流控技术在生物混合机器人中的可能贡献。
微流控生物混合机器人将结合不同类型的细胞,如肌肉和神经细胞。精细的神经支配网络将使在多个阵列中选择性控制特定的生物驱动器成为可能。微流控技术可以调节细胞微环境条件和微制造细胞载生物材料。这些应用将孕育越来越多用途和性能的生物混合机器人。最后,微流体组织灌注和生物反应器系统将产生更大的生物混合体,并具有持久和自主的功能。
4. 挑战和未来展望
生物混合机器人技术还处于起步阶段,还有很多领域有待探索,还有很多挑战有待解决。要将生物混合体转化为能够在现实环境中运行的平台,就必须解决细胞寿命、组织制造和机器人功能方面的几个挑战。
其中一个主要问题是,生命材料需要精确的环境条件才能生存,特别是,细胞环境应该能够有效地进行生化和气体交换。精确控制流体行为将有可能在不同水平上推进生物混合机器人技术。精确的微流体调节将促进生物混合系统的构建和发展。微流控将允许我们生成可组装的基础模块,作为更复杂和仿生生物的基础。
其次,微流控平台将使我们能够刺激细胞,以增强生物驱动器的组织生长。微流控技术更重要的功能是能够进行有效的组织灌注。高效的灌注将为宏观组织构建铺平道路,这不仅会给生物混合机器人带来革命,而且会对整个组织工程领域产生巨大的影响。
梁栋栋 | 作者
梁金 | 审校
邓一雪 | 编辑
商务合作及投稿转载|swarma@swarma.org
◆ ◆ ◆
搜索公众号:集智俱乐部
加入“没有围墙的研究所”
让苹果砸得更猛烈些吧!
相关参考
生物燃料颗粒生产机器全套:生物质燃料颗粒机设备包括:粉碎机、烘干机、搅拌混合器,输送机等。其中粉碎机是整套设备的部件,它把物料进行粉碎加工处理,然后通过烘干和搅拌等工序将原料制成生物质颗粒。1、粉碎机...
...率3D激光雷达以及激光气体传感器产品。其中,面向广义机器人应用的激光雷达为公司核心产品,广义机器人包括具有无人驾驶功能的汽车,也可称之为轮式机器人,另外还包括实现无人清扫、无人运送等功能的新型服务机器人...
...率3D激光雷达以及激光气体传感器产品。其中,面向广义机器人应用的激光雷达为公司核心产品,广义机器人包括具有无人驾驶功能的汽车,也可称之为轮式机器人,另外还包括实现无人清扫、无人运送等功能的新型服务机器人...
激光3D轮廓传感器(深入了解3D激光三角测量(1)——激光成像系统的配置方法)
...各个领域中的产品尺寸检测、焊缝跟踪、工件轮廓测量、机器人轨迹引导等诸多使用场景当中。虽然使用三角测量的基本概念很简单,但在设计此类系统时仍需要解决诸多
激光3D轮廓传感器(深入了解3D激光三角测量(1)——激光成像系统的配置方法)
...各个领域中的产品尺寸检测、焊缝跟踪、工件轮廓测量、机器人轨迹引导等诸多使用场景当中。虽然使用三角测量的基本概念很简单,但在设计此类系统时仍需要解决诸多
机器人的前景和未来论文(血管里的迷你医生:纳米机器人照进现实还有多远?)
...家们在《自然·通讯》杂志上发表了他们用DNA建造的纳米机器人的文章。科学家们用纳米机器人了解细胞机械敏感性的分子机制,以研究许多生物和病理过程。早在1966年上映的科幻电影《神奇旅程》中,人们就有了关于治疗疾病...
机器人传感器论文(《AdvMaterTech》:具有抗菌性的多功能可穿戴柔性传感器)
当前人们对生物和高分子领域关于检测来自生命系统信号的研究日益增多,尤其是具备监测功能的传感器用来检测心血管健康状况,来自感觉神经系统的信号,以及跟踪人体肌肉运动,而这些应用于生物系统的传感器需要高的灵...
...算机将旋转与每个关节分别相连的步进式马达,以便控制机器人(某些大型机器臂使用液压或气动系统)。与普通马达不同,步进式马达会以增量方式精确移动。这使计算机可以精确地移动机器臂,使机器臂不断重复完全相同的...
...公司业务覆盖了从自动化核心部件及运动控制系统、工业机器人到机器人集成应用的智能制造系统的全产业链,构建了从技术、质量、成本、服务和品牌的全方位竞争优势。公司业务主要分为两个核心业务模块:一是自动化核心...
...公司业务覆盖了从自动化核心部件及运动控制系统、工业机器人到机器人集成应用的智能制造系统的全产业链,构建了从技术、质量、成本、服务和品牌的全方位竞争优势。公司业务主要分为两个核心业务模块:一是自动化核心...